Pages
Links on this page

Go and look at John Dingleys' site about self balancing skateboards ~ the guy is a true pioneer and innovator and should be acknowledged as such
Had a total rethink of the electronics. I just could not get rid of the vibration problem that occurred when using just an accelerometer, so I am now using a combined accelerometer/gyro board from sparkfun electronics and a ARDUINO board. This is all at the suggestion of JOHN DINGLEY~ the absolute guru so self balancing skateboards. The code I have used is his ( all be it hacked around a bit by me). I take no credit for getting this working, I could not have done it without John's help but........
IT WORKS!!!!!!!!!!!!
see the video lower down the page
I was having a bit of a search around the inter web concerning the controllers for the diwheel. I was thinking about electronic stabilisation, not really planning on it but just some idle thinking. I came across a web site by Ben Smither ( currently unavailable?) the guy is a genius! also worth checking out Rodger Cleyes' and definately John Dingley
So there you have it, a one wheeled electronically balanced 'skateboard' !
Well I did a bit more research and found that a few more people had built them, mostly inspired by Ben's work. I really like the idea of these and so............... a new project begins!
Oh and by the way, Segway has patents on loads of self balancing vehicle ideas so you can't make a commercial version !
If you thought that one wheeled balancing vehicles were a new idea, they are not check THIS out.
All of the existing designs people seem to use an analogue accelerometer and gyro scope as the balance sensors. With electronics, my background is digital so I had a look at what was available. I found that a company called Memsic do a digital accelerometer called the MXD2020M. This has a digital output in the form of a pulse width modulated signal (PWM). This seems to simplify the sensor bit! no need to compensate for drift and no need for filtering ( kalman or anything else). So the idea is to use this sensor inputting to a PIC chip ( 16f628) running a simple PID control algorithm. the PIC will output a PWM waveform to drive an OSMC controller board using locked anti-phase for regenerative braking.
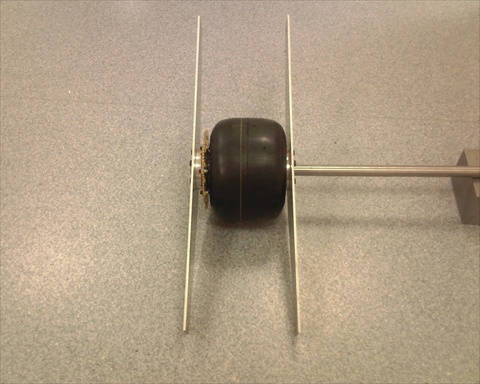
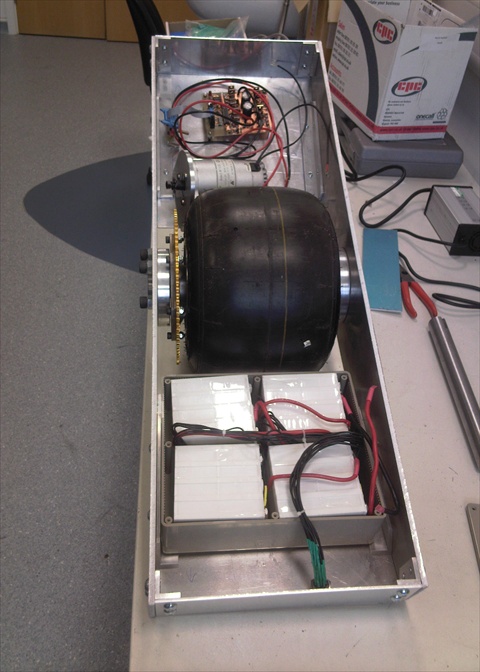
The board will use a kart rear wheel, 40mm axle and bearings, a 24v 500w motor and probably have an aluminium chassis. It will use chain and sprockets from a kart, 219 chain.
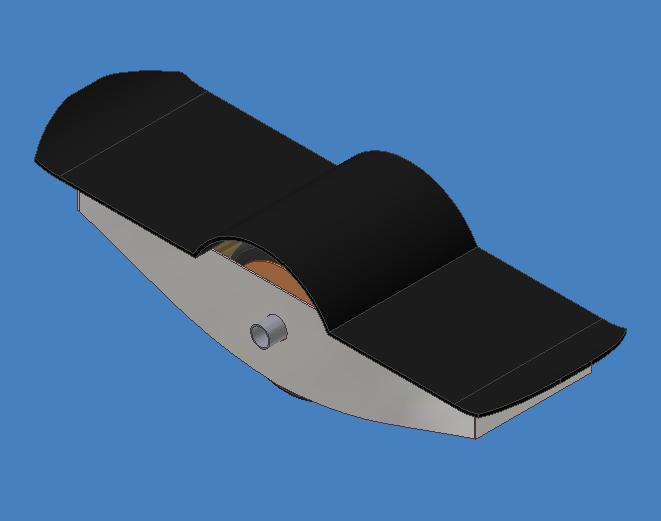
The finished item should look something like this.
see JOHN DINGLEYS site and his 'instructable' for details ~ my code is basically his 'ttwin wheeler' code modified for a different acceleromter/gyro board and a single wheel







there will be some, but in the mean time
check out the other peoples videos on you tube
http://www.youtube.com/watch?v=HGbbag9dklU
http://www.youtube.com/watch?v=pVQgE7mh_rc
http://www.youtube.com/watch?v=462Jj1xSSqc
http://www.youtube.com/watch?v=z2VZQLJZVZY&feature=related
http://www.youtube.com/watch?v=MokB1hGCpiU&feature=related
http://www.youtube.com/watch?v=zS0YhO6ZAgw&feature=related
http://www.youtube.com/watch?v=lf-qkxBWNgA&feature=related
and, for the first time a video of the uniboard in action
trickier than I thought, and a bit of a bugger to get on in the first place!
If you have to ask why? then you will never understand...........
Q. It all seems a bit complicated, all that electronics, accelerometers, software etc?
A. its what I do as a day job!
Q. Are you sure you couldn't market this?
A. YES. Its not my idea anyway. Like most things I build I am doing it to see if I can.
Q. Everyone else uses an accelerometer and a gyro, you only have a accelerometer?
A. Yes, buts its a digital one that gives out a pwm wave form. from that you can get the angle and the rate of change of angle do I don't think I need the gyro ~ but I could be wrong! and I am! I now use a accelerometer and gyro!
Just a few ramblings about what COULD be next for this idea...........
I would like to make the board shorter, I think it's longer than it needs to be! One way of doing this would be to use a 'hub motor', that is the motor is inside the kart hub. This would dramatically reduce the length and if the batteries were housed in a 'hollow' deck as John Dingley has done in his twin wheeler then the result should be a very 'compact' unit.
Radio control motors have come a long way in recent years! take a look at this baby...

http://www.hobbycity.com/hobbyking/store/uh_viewItem.asp?idProduct=5142
If you look at the spec this should do the job and it would fit in a standard kart hub. You would need a suitable motor controller and this might be suitable.......

http://www.hobbycity.com/hobbyking/store/uh_viewItem.asp?idProduct=10370
The bit I am unsure about at the moment is whether this controller can handle the quick reversal of direction necessary for 'self balancing'? They are used in RC cars so they should be, but........
I would really like to try this, but it could be an expensive test!
I might even get round to redesigning the board ( in CAD) based on this 'hub motor' idea just to see the possibilities?