Pages
Links on this page
'THE TRINITY'
The Return!
A TEAM FROM THE UNIVERSITY OF ADELAIDE HAVE GOT AN ELECTRIC DIWHEEL WORKING ~click here for details
I have decided to revisit this project. It's time has come. Some controllers have become available that are perfect for the job and I have found a way (hopefully!) of attaching the tyres to the wheels without pop rivets.
Back ground to the project (or why the hell did I build it!)
Much like the mono wheel the idea came from Douglas Self's site along with a fascination with 'Gerbiling*' ~ safer in a di wheel than a mono wheel,. if safer is the right word.
All the di wheels I have found details of use a petrol engine and presumably some sort of differential drive. Now petrol engines don't like running upside down so continuous 'gerbiling' would stall the engine. Electric motors on the other hand don't give a damn which way up they are! Having built a few electric vehicles, this, for what I want it to do, is the way forward. This would also allow independent drives to each wheel, doing away with the need for a differential and (in theory) allowing for a very, very manoeuvrable machine.
* ~ going completely over the top ( nothing to do with rodents). By applying the brakes the inner frame is locked to the wheel so over you go!
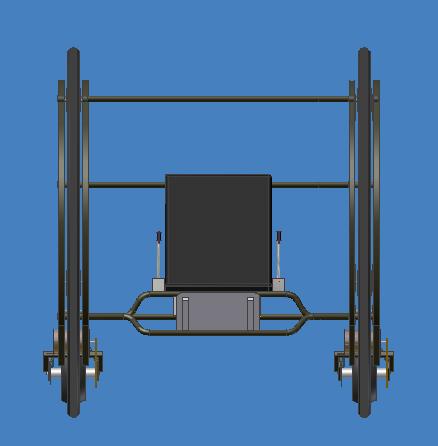
Unlike the Red Max, the di wheel has been fully designed before I get near my shed!!!!!!! there are some pictures of it lower down, the inner frame is stronger than the mono wheel.!
Whilst designing it a few things started to become clear...........
The controls are two joysticks, one for the left wheel, one for the right. The joysticks work with the electronic speed controller such that as the stick is moved forward the forward speed increases ; as it is pulled back the reverse speed increases. The centre (or neutral) position is stop. This means that if one stick is pushed full forward and one full reverse the driver (rider?) spins around a central vertical axis. The result of this degree of controllability should be a highly manoeuvrable vehicle!
Each joystick has a brake lever. This lever has two functions; firstly it operates the disc brake on the drive wheel, secondly it 'disconnects' the motor. This means (hopefully) some spectacular multiple gerbiling! FORWARD OR BACKWARD!
And now for the really scary bit. Stick with me on this one because it is hard the explain..........
You pull both joysticks full reverse, then pull on the brakes. This will cause you and the di wheel to roll over backwards. When you are completely upside down you release the brakes and push one joystick forward and the other back. This should cause a 'half spin'. Now since you are still rotating backwards you should come out of this rotation facing forwards! it seems right in theory.......... This would work going forwards and coming out backwards as well!
The more you think about it the more bazaar manoeuvres you come up with.......
The gearing has been calculated to give a top speed of 20MPH.~ UTTER RUBBISH! A MORE PRACTICAL FIGURE OF 14MPH HAS BEEN SETTLED ON
A four or five point harness is going to be used by the way. from the designs I think my head will miss the ground by about three inches so a helmet might also be useful.
The wheel - 5' diameter hoop of 2" steel tube. wall thickness 1/8". made by Barnshaws bending in Audenshaw
The inner frame - 4.5' diameter hoop of 3/4" steel tube. wall thickness 1/8".
The rollers - same as the monowheel
The motors - 1000watt, 36 volt DC motors from TNC scooters in the USA
The drive wheel - mini moto wheel with sprocket for larger chain. disc brake.
The tyre - Three 19" mountain bike tyres, cut to size and pop riveted on. may be better with something with a 'squarer' section.
The seat - a kart one.
The harness - a five point racing/rally type. from EBay
The shocks - not used as shocks but keep the drive wheel pressed to the outer wheel. Mountain bike units from EBay.
The batteries - these are expensive, but vital! probably three (or six) 12volt 18AH ones (or bigger).
The controllers - 4QD ones with the all important 'inhibit' signal
All other parts are going to be made by me, in my shed, again.




I have started the build!
Here are the drive wheels and swing arms, with brakes



new pictures! Note there are only three rollers!










pictures of the monowheel conversion ~ the handlebar/seat unit comes off on four bolts!

















see my head will just miss the floor!
a bit of testing of the electric drive! gearing is to high and the batteries needed charging!
Probably bloody terrifying! but that is kind of the idea!
Q1. Couldn't you design some 'electronics' that would prevent 'Gerbiling' ?
A1. Yes. but why would I? that would remove all the fun.
Q2. Couldn't you use just one central joystick?
A2. Yes. I thought about this but decided to have two separate ones since the brakes need to be separate. Also this allows the possibility of two electric monowheels.
Q3. Why not make the wheels 'tilt' to allow better cornering?
A3. Nice idea! but lets not run before we can walk eh?
Q4. The actual construction does not seem to follow the CAD design?
A4. You noticed that? As soon as I get the actual metal in my hand the little grey cells set to work and plans change!
Q5. Why have you come back to this after 10 years!?
A5. It's time has come............
EDWARD ~ The University of Adelaide Di wheel

for more details http://www.mecheng.adelaide.edu.au/robotics/robotics_projects.php?wpage_id=44&title=60&browsebyauthor=115
The videos are great take a look!